コミュニケーションロボットとHMDを用いた共生型テレイグジスタンスシステム
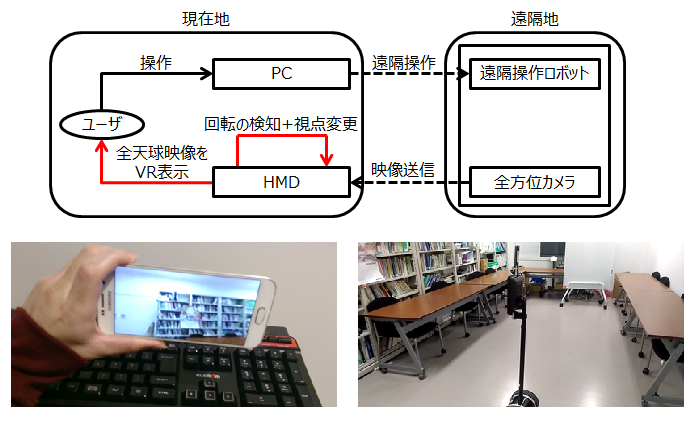
遠隔地に存在する物が、あたかも自分の近くに存在しているかのような感覚(遠隔臨場感) を提供する遠隔臨場感システムが注目を集めています。多くの遠隔臨場感システムは、遠隔地の映像を取得することで臨場感の向上を図っています。そのうちの一つに、遠隔操作ロボットにカメラを搭載し、ロボットが向いている方向の映像を取得する手法があります。この手法は、ロボットを遠隔操作することで遠隔地を自由に移動し映像を取得できるという利点を持ちますが、取得される映像がロボットに搭載されたカメラの向きに制限されるため、臨場感や利便性の観点からは未だ十分とは言えません。本研究では、遠隔操作ロボットと全方位カメラを組み合わせることによって、ロボットの向きに依存しない自由視線映像の取得が可能な遠隔臨場感システムを実現します。